

Tel: 137-2421-1742 E-mail: paul@rdbuy.cn
ICP备案证书号:粤ICP备12082730号-1
共执行 65 个查询,用时 0.014806 秒,在线 1828 人,Gzip 已启用,占用内存 2.497 MB
Powered by ECShop v4.0.1






![CMR3000-D01 vti消费级三轴陀螺仪[停产]](images/201212/thumb_img/380_thumb_G_1356333795911.jpg)






传统的陀螺仪主要是利用角动量守恒原理,因此它主要是一个不停转动的物体,它的转轴指向不随承载它的支架的旋转而变化。
但是微机械陀螺仪的工作原理不是这样的,因为要用微机械技术在硅片衬底上加工出一个可转动的结构可不是一件容易的事。微机械陀螺仪利用科里奥利力——旋转物体在有径向运动时所受到的切向力。下面是导出科里奥利力的方法。有力学知识的读者应该不难理解。
在空间设立动态坐标系。用以下方程计算加速度可以得到三项,分别来自径向加速、科里奥利加速度和向心加速度。
科里奥利力

.jpg)
动态坐标系
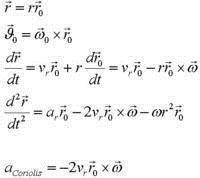
公式推导
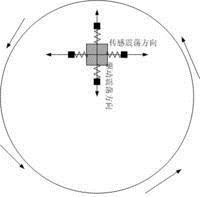
如果物体在圆盘上没有径向运动,科里奥利力就不会产生。因此,在MEMS陀螺仪的设计上,这个物体被驱动,不停地来回做径向运动或者震荡,与此对应的科里奥利力就是不停地在横向来回变化,并有可能使物体在横向作微小震荡,相位正好与驱动力差90度。MEMS陀螺仪通常有两个方向的可移动电容板。径向的电容板加震荡电压迫使物体作径向运动(有点象加速度计中的自测试模式),横向的电容板测量由于横向科里奥利运动带来的电容变化(就象加速度计测量加速度)。因为科里奥利力正比于角速度,所以由电容的变化可以计算出角速度。

BOSCH SMG 070原理图
2轴MEMS陀螺仪。它采用了闭合回路、数字输出和传感器芯片跟ASIC芯片分开平放连线的封装方法。
微机械陀螺仪的设计和工作原理可能各种各样,但是公开的微机械陀螺仪均采用振动物体传感角速度的概念。利用振动来诱导和探测科里奥利力而设计的微机械陀螺仪没有旋转部件、不需要轴承,已被证明可以用微机械加工技术大批量生产。
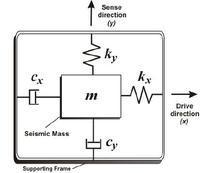
为机械陀螺结构示意图
绝大多数微机械陀螺仪依赖于由相互正交的振动和转动引起的交变科里奥利力。振动物体被柔软的弹性结构悬挂在基底之上。整体动力学系统是二维弹性阻尼系统,在这个系统中振动和转动诱导的科里奥利力把正比于角速度的能量转移到传感模式。
通过改进设计和静电调试使得驱动和传感的共振频率一致,以实现最大可能的能量转移,从而获得最大灵敏度。大多数微机械陀螺仪驱动和传感模式完全匹配或接近匹配,它对系统的振动参数变化极其敏感
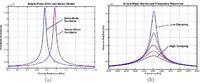
驱动和感应的频宽
,而这些系统参数会改变振动的固有频率,因此需要一个好的控制架构来做修正。如果需要高的品质因子(Q),驱动和感应的频宽必须很窄。增加1%的频宽可能降低20%的信号输出。(上图a) 还有阻尼大小也会影响信号输出。(上图b)
一般的微机械陀螺仪由梳子结构的驱动部分和电容板形状的传感部分组成。有的设计还带有去驱动和传感耦合的结构。

梳子结构的驱动部分
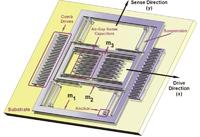
传感耦合的结构